






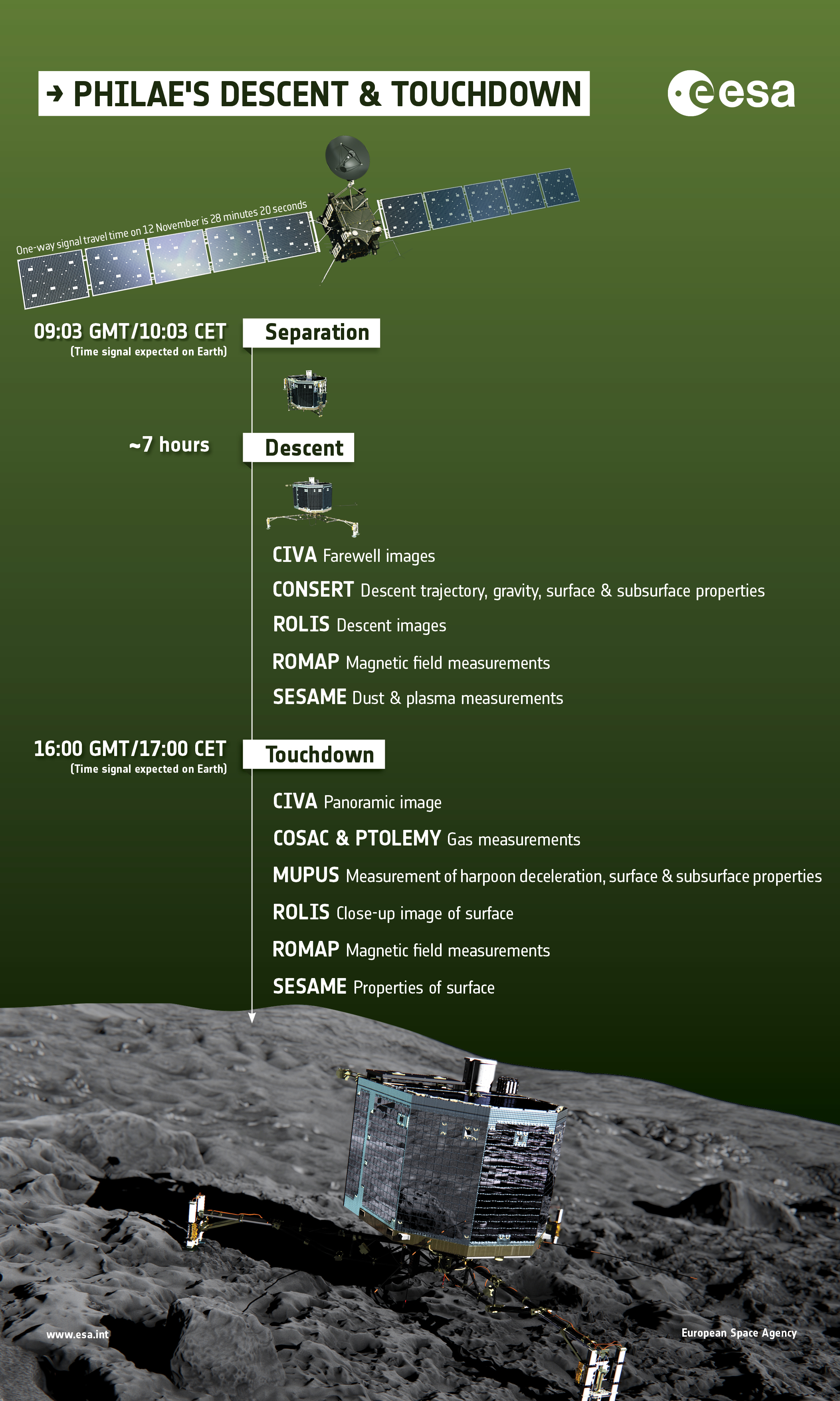
The Philae lander has separated from the Rosetta orbiter, and is now on its way to becoming the first spacecraft to touch down on a comet.
A timeline of the most crucial activities related to separation, descent and landing on 11 and 12 November.
It has been compiled with inputs from the Flight Control Team at ESOC and the Science Operations Team at ESAC and is accurate as of now. PLEASE remember: many of these times are subject to change and confirmation, given the extremely dynamic nature of this delicate and complex operation. We’ll do our best to update this as we receive firm information, but on 12 November the live webcasts from ESA TV and ESA’s social media accounts (Twitter!) will be the best ways to get the latest information.
Admittedly, this timeline is a little dense, but we thought it better to provide more detail for those who – like us! – are extreme Rosetta & Philae fans (and you know who you are!). We’ll publish a lighter version in the main ESA website later today and there’s also a high-level version in the press kit (PDF; page 63 or in SlideShare here). And for those who wish, here is the opposite: an even more detailed version as a PDF, or also in Slideshare.
Review the notes/legend underneath for acronyms (no space mission can succeed without them!). There’s also a diagramme illustrating the delivery orbits.
ROSETTA AND PHILAE OPERATIONS TIMELINE AROUND COMET LANDING 11-12 NOVEMBER 2014
All times are subject to change and should not be assumed confirmed. Actual times may vary considerably. Please follow ESA TV, the Rosetta website, the Rosetta blog and ESA social media for the latest updates. All are linked via http://rosetta.esa.int
One-way light time (OWLT): 00h:28m:20s
Earth distance: 511 million km
CET/UTC offset: 01h:00m:00s
Updated 8.11.2014 to correct 12/11 04:28UTC event and add 01:00UTC event
Updated 12.11.2014 to indicate new GO/NOGO time for Philae lander, now at 02:35 UTC / 03:35 CET
Date |
UTC
|
CET
|
Event |
| 11/11 | 01:48:49 | 02:48:49 | BOT ESA New Norcia (NNO) |
| 11/11 | 03:10:00 | 04:10:00 | BOT NASA DSN Canberra |
| 11/11 | 12:25:00 | 13:25:00 | EOT Canberra |
| 11/11 | 13:40:00 | 14:40:00 | BOT DSN Madrid |
| 11/11 | 13:58:05 | 14:58:05 | BOT ESA Malargüe (MLG) |
| 11/11 | 14:00:00 | 15:00:00 | Flight Dynamics Team at ESOC begin orbit determination procedure to accurately fix Rosetta’s precise trajectory |
| 11/11 | 14:30:17 | 15:30:17 | EOT ESA NNO |
| 11/11 | 18:33:20 | 19:33:20 | Lander switch-on. Includes switching on Electrical Support System, which controls orbiter communication interface with the lander |
| 11/11 | 19:05:20 | 20:05:20 | Lander batteries and compartment heating ADS Tank (Active Descent System – provides cold gas thrust upwards to avoid rebound upon landing) opening |
| 11/11 | 19:25:20 | 20:25:20 | Lander Primary Battery conditioning start; about 28 mins |
| 11/11 | 19:00:00 | 20:00:00 | EOT DSN Madrid |
| 11/11 | 19:30:00 | 20:30:00 | GO/NOGO1 – Last full orbit determination; ESOC Flight Dynamics confirms Rosetta trajectory is correct |
| 11/11 | 20:03:00 | 21:03:00 | Rosetta starts slew to pre-delivery manoeuvre attitude (expected loss of signal) |
| 11/11 | 20:20:00 | 21:20:00 | BOT DSN Goldstone |
| 11/11 | 20:43:00 | 21:43:00 | End of Rosetta slew |
| 11/11 | 20:52:20 | 21:52:20 | Start Lander flywheel operation – provides stability during descent |
| 11/11 | 23:25:00 | 00:25:00 | BOT DSN Goldstone |
| 11/11 | 23:40:00 | 00:40:00 | BOT DSN Canberra |
| 12/11 | 00:00:00 | 01:00:00 | EOT DSN Goldstone |
| 12/11 | 00:00:00 | 01:00:00 | GO/NOGO 2(a) – Confirm telecommands to control delivery sequence are ready GO/NOGO 2(b) – ESOC confirms Rosetta is ready |
| 12/11 | 01:00:00 | 02:00:00 | ESOC uploads commands to control spacecraft for Lander delivery operations |
| 12/11 | 01:03:20 | 02:03:20 | Lander generates final telemetry (TM) on-board prior to GO/NOGO for SEP decision |
| 12/11 | 01:35:00 | 02:35:00 | (EXPECTED AT 02:35 UTC / 03:35 CET) GO/NOGO 3 – Confirm Philae is ready for landing |
| 12/11 | 01:46:10 | 02:46:10 | BOT ESA New Norcia |
| 12/11 | 03:02:50 | 04:02:50 | EOT ESA Malargüe |
| 12/11 | 04:03:20 | 05:03:20 | Lander – start of Separation, Descent & Landing (SDL) activities Start switching Lander instruments ON; ROMAP first |
| 12/11 | 04:28:20 | 05:28:20 | Rosetta – Start executing on-board commands for delivery operations |
| 12/11 | 04:34:20 | 05:34:20 | Start heating Lander batteries to separation temperature |
| 12/11 | 06:03:20 | 07:03:20 | Rosetta – Earliest start pre-delivery manoeuvre (thruster burn) Burn will be followed by loss of signal due to subsequent slew for separation Manoeuvre expected to be about 0.46m/s & about 6 mins duration |
Date |
UTC
|
CET
|
Event |
| 12/11 | 06:35:00 | 07:35:00 | Earliest GO/NOGO 4 – final decision to go for landing |
| 12/11 | 07:03:20 | 08:03:20 | Rosetta – Latest start pre-delivery manoeuvre |
| 12/11 | 07:35:00 | 08:35:00 | Latest GO/NOGO 4 – final decision to go for landing |
| – | – | Following MVR, ESOC Flight Dynamics Team conducts rapid assessment of MVR performance to verify burn results | |
| 12/11 | 07:49:20 | 08:49:20 | Lander – Switch on MUPUS |
| 12/11 | 07:52:20 | 08:52:20 | Start MUPUS operation and switch-on CivaRolis ÇIVA and ROLIS are imaging systems; ÇIVA makes panoramic images, ROLIS looks down |
| 12/11 | 07:55:20 | 08:55:20 | Start CivaRolis operation and switch-on SESAME (dust sensor) |
| 12/11 | 08:04:20 | 09:04:20 | Start SESAME operation |
| 12/11 | 08:46:20 | 09:46:20 | Start MSS (Mechanical Support System), which executes the mechanical separation from the Orbiter |
| 12/11 | 08:46:20 | 09:46:20 | Separation Motors ON |
| 12/11 | 08:49:20 | 09:49:20 | Start CONSERT Orbiter operation |
| 12/11 | 08:50:20 | 09:50:20 | Start CONSERT Lander operation |
| 12/11 | 08:51:20 | 09:51:20 | Start MSS sequence – internal autosequence to prepare for landing |
| 12/11 | 08:53:20 | 09:53:20 | Lander now on internal battery power |
| 12/11 | – | – | Screws in Separation Motors start to rotate and impart deployment speed to push Lander away, retrograde .21 m/s |
| 12/11 | 09:03:20 | 10:03:20 | PHILAE SEPARATION (Forecast; 94-sec window) Separation confirmation received on ground via ESA’s NNO New Norcia station |
| 12/11 | 09:04:12 | 10:04:12 | Lander (ÇIVA) obtains first images of Orbiter (FAREWELL1) |
| 12/11 | 09:06:17 | 10:06:17 | Lander (ÇIVA) obtains seconds images of Orbiter (FAREWELL2) |
| 12/11 | 09:12:17 | 10:12:17 | Lander / Orbiter separation distance now ~100m Earliest autodeployment of landing gear and ROMAP boom antenna |
| 12/11 | 09:25:50 | 10:25:50 | Lander starts rotation of 14 degrees to stable landing orientation |
| 12/11 | 09:43:20 | 10:43:20 | Rosetta performs post-delivery manoeuvre Burn will be followed by loss of signal due to subsequent slew back to nominal pointing Manoeuvre magnitude to be determined on 12/11 |
| 12/11 | 09:47:17 | 10:47:17 | Lander completes all post-separation activities |
| 12/11 | 10:53:20 | 11:53:20 | Acquisition of signal (AOS) from Rosetta Expected AOS; link with Rosetta now re-established |
| 12/11 | 11:59:20 | 12:59:20 | Start of stored data downlink from Rosetta & Philae |
| 12/11 | 12:20:00 | 13:20:00 | EOT DSN Canberra |
| 12/11 | 13:15:00 | 14:15:00 | BOT DSN Madrid |
| 12/11 | 13:55:00 | 14:55:00 | BOT ESA MLG |
| 12/11 | 14:27:00 | 15:27:00 | EOT NNO |
| 12/11 | 14:58:57 | 15:58:57 | Lander – switch-on Anchor & CivaRolis |
Date |
UTC
|
CET
|
Event |
| 12/11 | 15:01:57 | 16:01:57 | Lander – start imaging landing site and switch on ADS (Active Descent System) |
| 12/11 | 15:07:02 | 16:07:02 | ROLIS begins imaging |
| 12/11 | 15:17:15 | 16:17:15 | On board Lander, systems conduct final pre-touch-down operations |
| 12/11 | 15:22:20 | 16:22:20 | Start of Lander touch-down window |
| 12/11 | 16:02:20 | 17:02:20 | EXPECTED LANDING and receipt of signal (Forecast; 40 min variability) |
| 12/11 | – | – | Upon landing – start post-touch-down operations including: * ADS thruster fires for ~15 sec to avoid rebound * Harpoons (X2) fire to secure Lander to surface * Flywheel off |
| 12/11 | 16:07:12 | 17:07:12 | ÇIVA-P panoramic imaging on Lander obtains first images of surface and transmits same (forecast; depends on landing time) |
| 12/11 | 16:07:14 | 17:07:14 | Separation, Descent & Landing (SDL) science observations continue: Ptolemy & COSAC begin science gathering; data collected during descent and initial surface observations will be uploaded |
| 12/11 | 16:39:39 | 17:39:39 | Lander completes SDL operations; upload of science data |
| 12/11 | 17:49:07 | 18:49:07 | Lander begins First Science Sequence (FSS) Block 1; runs about 7 hours |
| 12/11 | 19:00:00 | 20:00:00 | EOT DSN Madrid |
| 12/11 | 19:03:00 | 20:03:00 | End of Lander/Orbiter first communication window |
| 13/11 | 01:43:00 | 02:43:00 | BOT ESA NNO |
| 13/11 | 02:59:00 | 03:59:00 | EOT ESA MLG |
Keen for more details? Download the extended version of this timeline here.
Notes:
| BOT | Begin of track | |||
| EOT | End of track | |||
| NNO | ESA – ESTRACK 35m New Norcia tracking station, Australia | |||
| MLG | ESA – ESTRACK 35m Malargüe tracking station, Argentina | |||
| LDR | Philae Lander | |||
| ROS | Rosetta Orbiter | |||
| LCC | Lander Control Centre, DLR/Cologne | |||
| ESOC | Rosetta Control Centre, ESA/Darmstadt | |||
| ROLIS | Rosetta Lander Imaging System (ROLIS): CCD imager designed to return images of the landing site before and after Philae has landed | |||
| ADS | Active Descent System (ADS) – this system emits cold gas thrust at touchdown to avoid rebound. | |||
| BOT | Indicates when station is pointing & ready. Actual acquisition of signal may come only afterwards | |||
| DSS 25 | NASA – DSN 34m Goldstone tracking station, California, USA | |||
| DSS 45 | NASA – DSN 34m Canberra tracking station, Australia | |||
| DSS 55 | NASA – DSN 34m Madrid tracking station, Spain | |||
| DSS 54 | NASA – DSN 34m Madrid tracking station, Spain | |||
| MVR | Manoeuvre – a thruster burn to change direction and/or speed | |||
| MSS | (Mechanical Support System) is the lander side of Philae which executes the mechanical separation from the orbiter. | |||
| ESS | ESS (Electrical Support System) is the orbiter part of the lander. The ESS controls the orbiter communication interface with the lander. ESS itself operates as usual as power and data interface to the Orbiter. | |||
Link to Lander science instruments viahttp://www.esa.int/Our_Activities/Space_Science/Rosetta/Lander_Instruments
Categories: Leadership in Space






